Тип роторный датчик кольца выскальзывания DTS-01 вращающего момента
Модель: DTS-01
Емкость: 0.1/0.2/0.3/0.5/1/2/3/5/10/20/30/50/100Nm
Точность: ±0.1; ±0.3; ±0.5%F.S
Чувствительность выхода: 1.0~1.5.0 mV/V, 4-20mA, 0-5/0-10Vdc
Особенности:
1, датчик вращающего момента состоит из тензометрического датчика и интегральной схемаы с высокой точностью и стабилизированным представлением.
2, с превосходной долгосрочной стабильностью
3, с ключевым соединением на обоих конец
4, 4000RPM самое большее
Технические данные:
| Работая температура: |
-10~+80 ℃ |
| Ряд компенсированный температурой: |
℃ комнатной температуры ~+60 |
| Влияние температуры на нул: |
℃ F.S/10 ± 0.1% |
| Напряжение тока возбуждения: |
12 VDC |
| Оскорбленное сопротивление: |
2000 MΩ/100VDC |
| Сопротивление входа: |
700±10/350±10 Ω |
| Сопротивление выхода: |
700±5/350±5 Ω |
| Нул выходов: |
0~± 1% F.S |
| Перегрузка безопасности: |
120% F.S |
| Длина кабеля: |
3 m |
|
Кабельное соединение:
|
Красный: Чернота Exc+: Exc -
Зеленый цвет: Сигнал + белый: Сигнал
|
Размер: mm
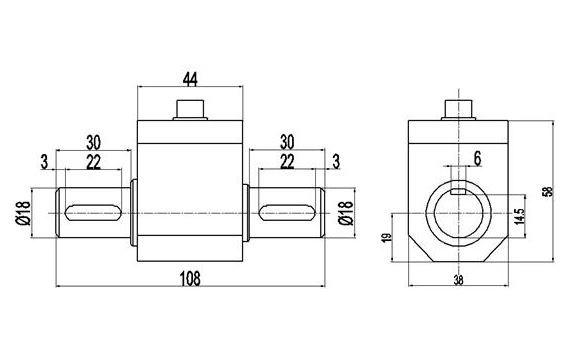
ключевой размер паза: LxDxW 22x3.5x6mm
1, зона применения
Датчик вращающего момента серии DTS динамический точный измеряющий прибор для вращающего момента и механического расхода энергии. Главным образом приложенный внутри
1,1 мотор электромотора, двигателя, двигатель внутреннего сгорания и другое вращая оборудование.
1,2 вентилятор, водяная помпа, ключ вращающего момента
1,3 поезд, автоматическая чернь, трактор, самолет, корабль, машина минирования
1,4 рециркуляционная система воды
1,5 Viscometer
1,6 перерабатывающая промышленность
2, требование к установки
2,1 соответствующий и для вертикальной и горизонтальной установки
2,2 все нагружая оборудование, датчик вращающего момента, силовое оборудование должно быть установлено на твердую платформу для избежания чрезмерной вибрации. В противном случае, оно может причинить неустойчивое чтение, уменьшить точность или даже датчик вращающего момента повреждения.
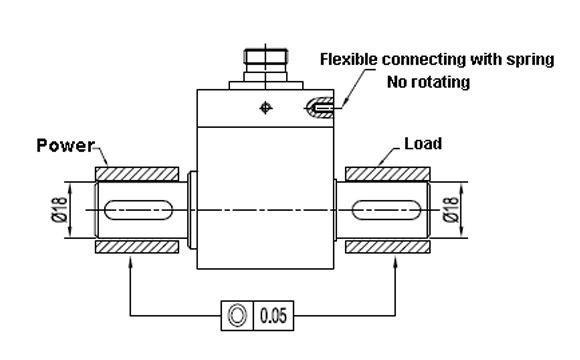
2,3 соединение штыря пользы эластичное
2,4 гибкая отладка порекомендована для исправлять средняя часть датчика вращающего момента. Не приложите твердую отладку.
2,5 допуск концентричности нагружая оборудования, датчика вращающего момента, силового оборудования должен быть более менее чем Φ0.05mm.
3, шаги установки
3,1 подтвердите расстояние между силовым оборудованием и нагружая оборудованием основанными на длине датчика типа и вращающего момента соединения вала. Отрегулируйте зазор между линией axil (силы & нагружая оборудования) и плоскость начала отсчета, убеждается что coaxiality между ими thanΦ0.03mm, после этого сила починки & нагружая оборудование на плоскости начала отсчета.
3,2 установите соединение на каждый вал
3,3 регулировка расстояние между датчиком вращающего момента и плоскостью начала отсчета, убеждается что coaxiality между их линией axil и линией axil силы & нагружая оборудованием меньше thanΦ0.03mm. После этого датчик вращающего момента починки на плоскости начала отсчета.
3,4 починка соединение, установка закончила.
4, нормальные пути установки
4,1 когда скорость более менее чем 300RPM, никакой частый вращать по часовой стрелке и анти--по часовой стрелке, некоторый гибкий объект можно использовать для того чтобы соединиться с датчиком вращающего момента и предотвратиться его от вращать.
4,2 когда скорость выше чем 300RPM, с частый вращать по часовой стрелке и анти--по часовой стрелке, исправляющ плита как на фронте, так и на задней части датчика вращающего момента необходимо. Добавьте 2-3 mm резины кремния в середине датчика вращающего момента и фиксируя доски с количеством обжатия 15%-20% для того чтобы предотвратить его от становить твердого соединения.

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!